Candidate for a Research Masters Degree with a Concentration in Robotics at Carnegie Mellon University
My name is Madeleine Weaver and I am pursuing a Masters degree in Mechanical Engineering with a concentration in Robotics at Carnegie Mellon University.
I earned an associates degree in Electrical and Computer Engineering at Massachusetts Bay Community College, during which time I participated in a NSF-funded research program at the University of Southern California's MxR lab where I worked on a team to build an augmented reality environment to study ethical decision-making.
I earned my bachelor's degree in Electrical and Computer Engineering from Northeastern University and worked in Professor Alireza Ramezani's SiliconSynapse Lab as an
undergraduate research assistant to help build a bio-mimetic bat robot. I also participated two years in a row on a finalist team in NASA's Big Idea Challenge to address
specific challenges in implementing robotic systems in space.
While studying at Northeastern University, I had one position as an Animatronics Engineer Co-Op at Hasbro and another at FGC Plasma Solutions as an Electrical Engineer Co-Op.
In pursuing a Master's degree at Carnegie Mellon University, I became a member of AiPEX lab where I studied Artificial Intelligence and Machine Learning applied to robotic control and
design. I have presented my research at several global venues including companies in India and Japan, as well as CMU Africa.
My interests include robotics and the intersection of art and technology.
PORTFOLIO
MY WORK
Here are some photos of my past projects.
Humanoid Face Robot AiPEX Lab, Carnegie Mellon University Click Project Title for Description
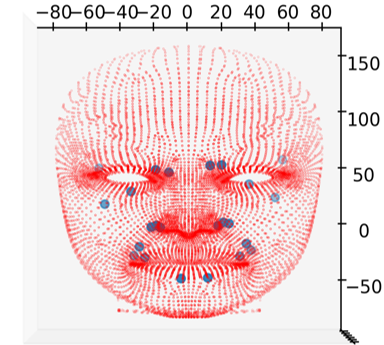
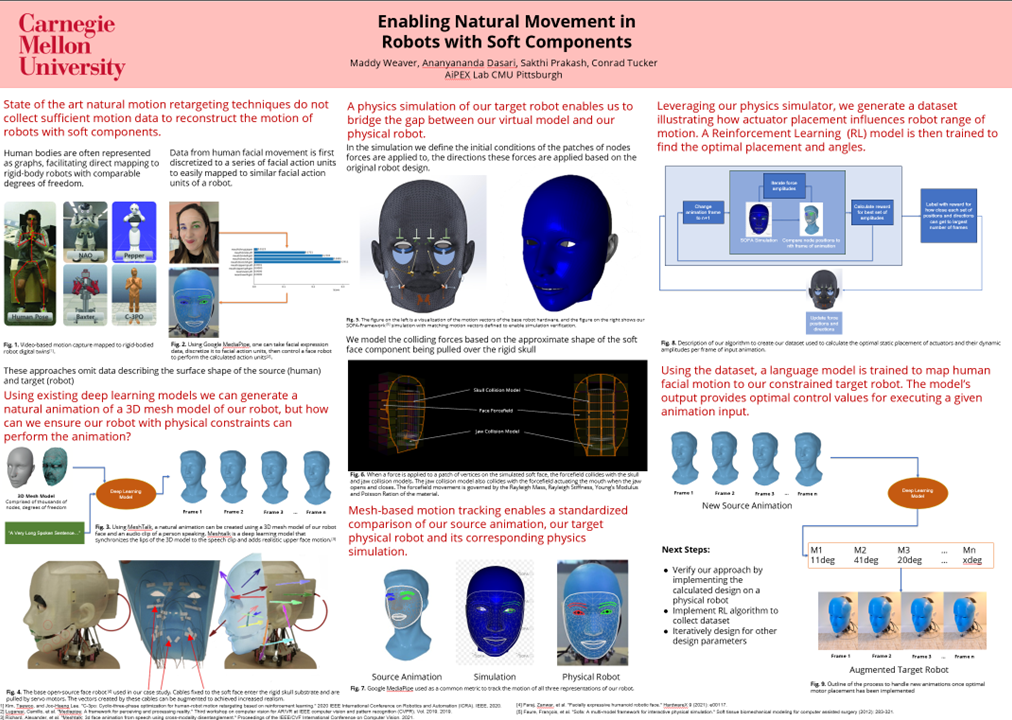
While in the computer vision domain
there exist many deep learning methods to generate and retarget lip-synchronization motion to 3D models, there is presently no analogous method
to retarget these 3D animations to physical robots. In this work in progress, we seek to develop a physically constrained method to co-design hardware and a controller
to enable the natural animation of a robot corresponding to input speech audio.
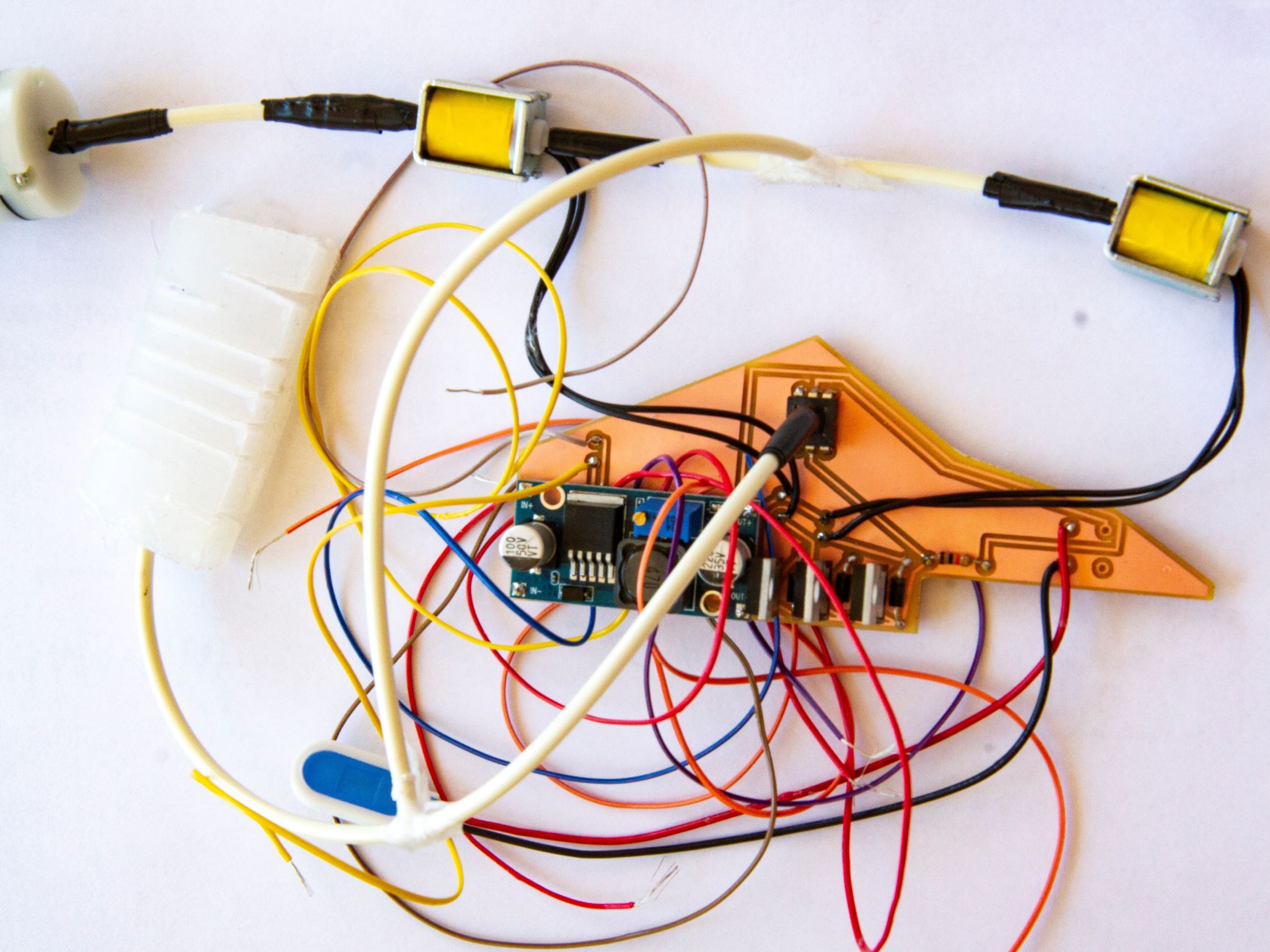
Jellyfish Robot Bioinspired Robotics Course Project, Carnegie Mellon University Click Project Title for Description
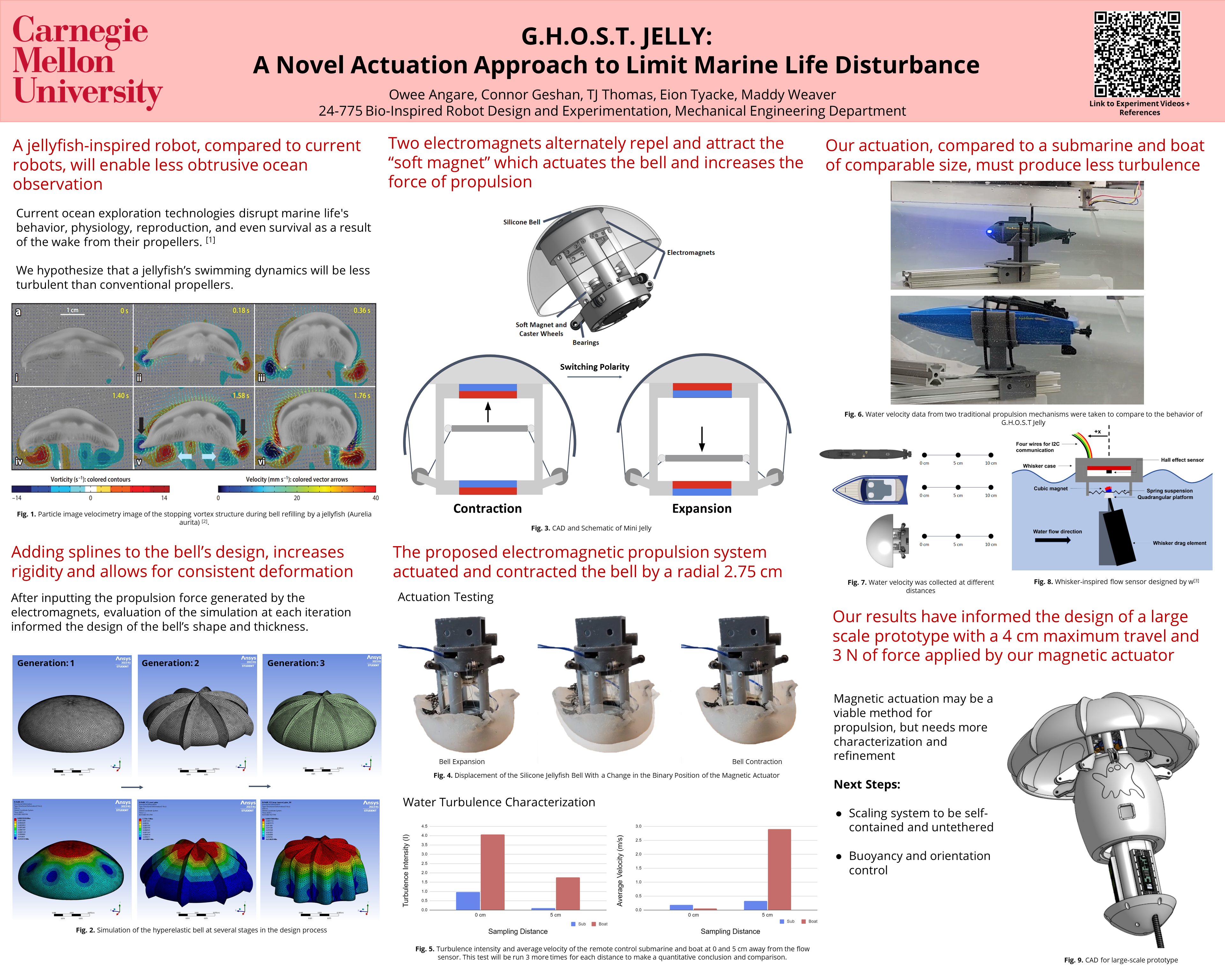
As the effects of climate change begin to affect ecosystems in ways that aren’t
immediately apparent, it’s important to observe environments at risk. Typically researchers use robotic underwater vehicles to track and study aquatic life. These robots are robust to incident currents
underwater, but the wake from their propellers may disrupt the ecosystem the robot intends to study. To make aquatic environmental monitoring systems less obtrusive, we propose using a jellyfish-inspired
robot to study marine life. We hypothesize that the wake from jellyfish-inspired robots will be less turbulent and therefore reduce the disturbance to the ecosystem. We show that an electromagnet-driven
propulsion system will produce less turbulent wake than propeller-based systems.
Mouth Robot Northeastern University, Carnegie Mellon University Click Project Title for Description
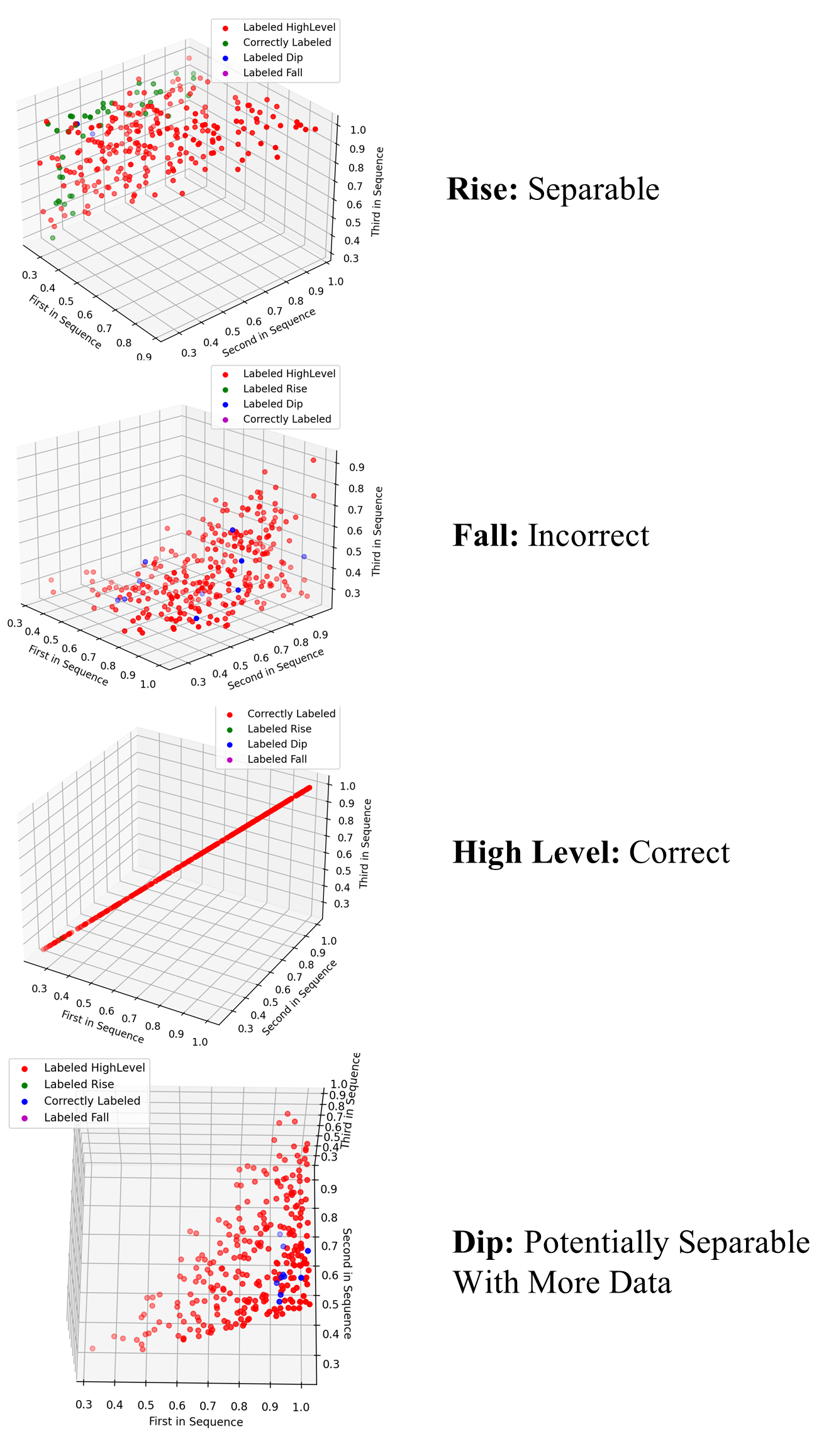
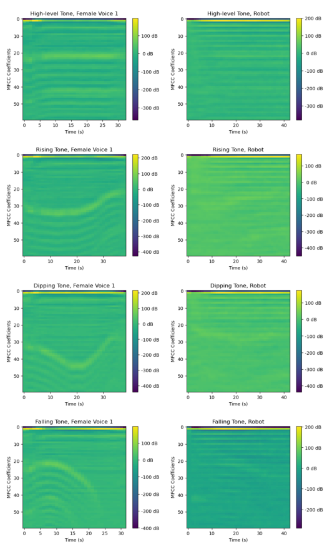
Humanoid robots are increasingly being developed for healthcare, education and service applications. One aspect of humanoid
robotics that remains an unsolved problem is achieving high fidelity lip synchronization. One potential approach to improving
lip synchronization is using machine learning (ML) methods to mechanically actuate human speech sounds, linking auditory and
visual output. The present work gives recommendations for improving humanoid robot hardware and software to better mimic
human speech. The method includes sampling audio from the robot for testing of a convolutional neural network (CNN) trained
on human audio to determine if the robot audio signals are similar to human audio signals. It was determined that limitations
in pitch and tone range of both the variable pitch pneumatic sound generator and the deformable resonance tube would need to
be improved. Reinforcement learning was also recommended for future research to explore more of the hardware’s abilities to
produce a more human-like sound.
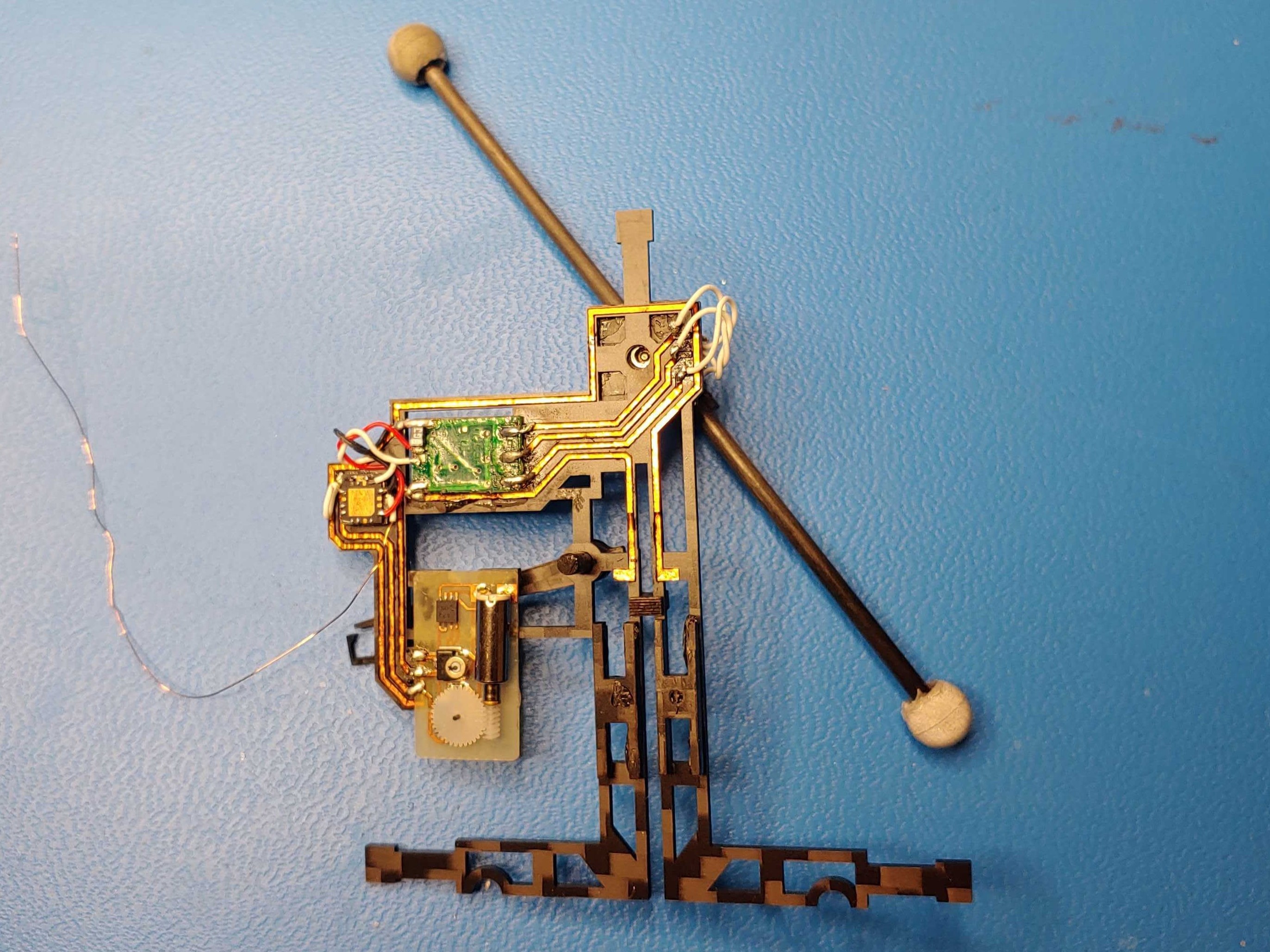
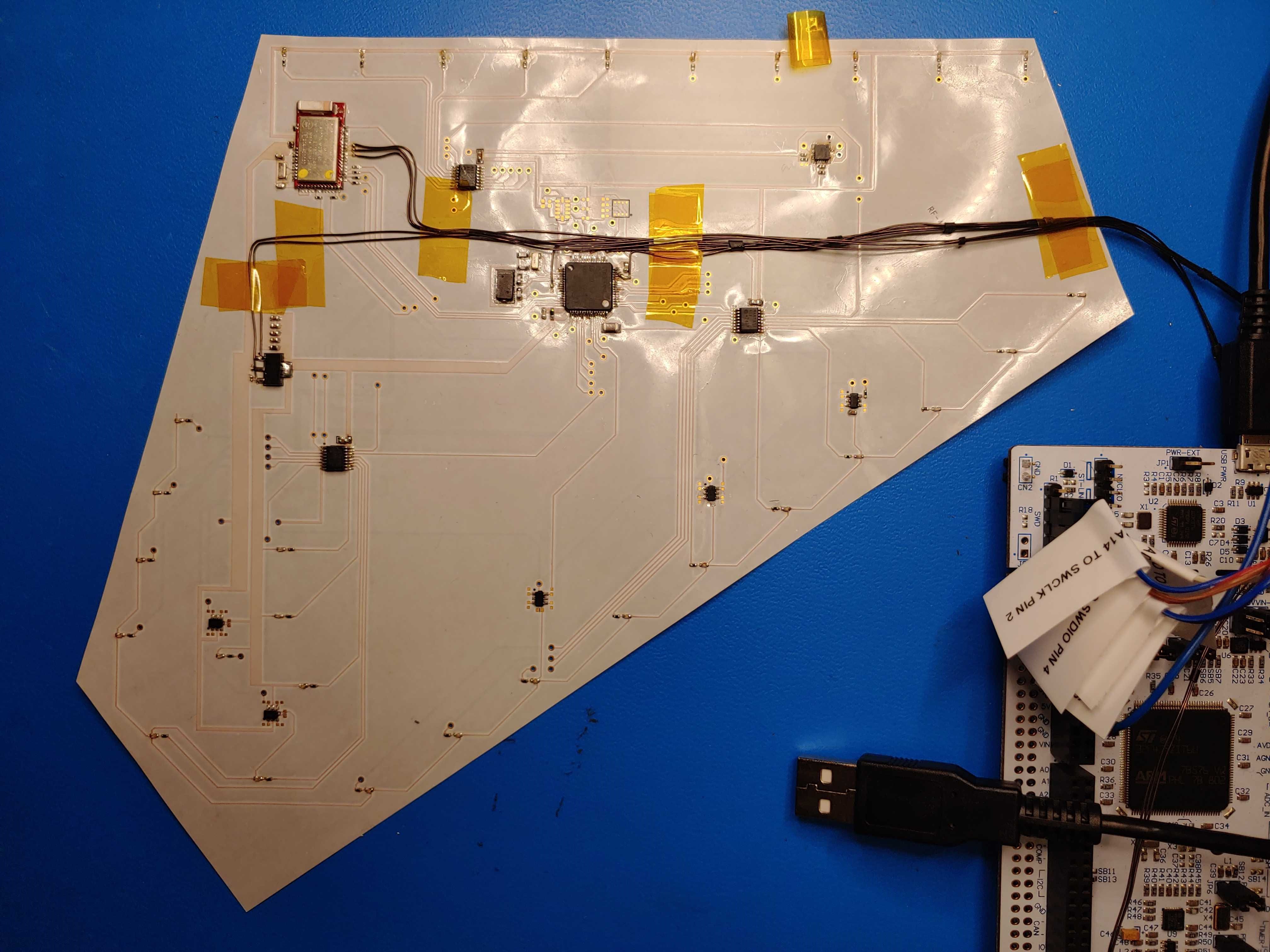
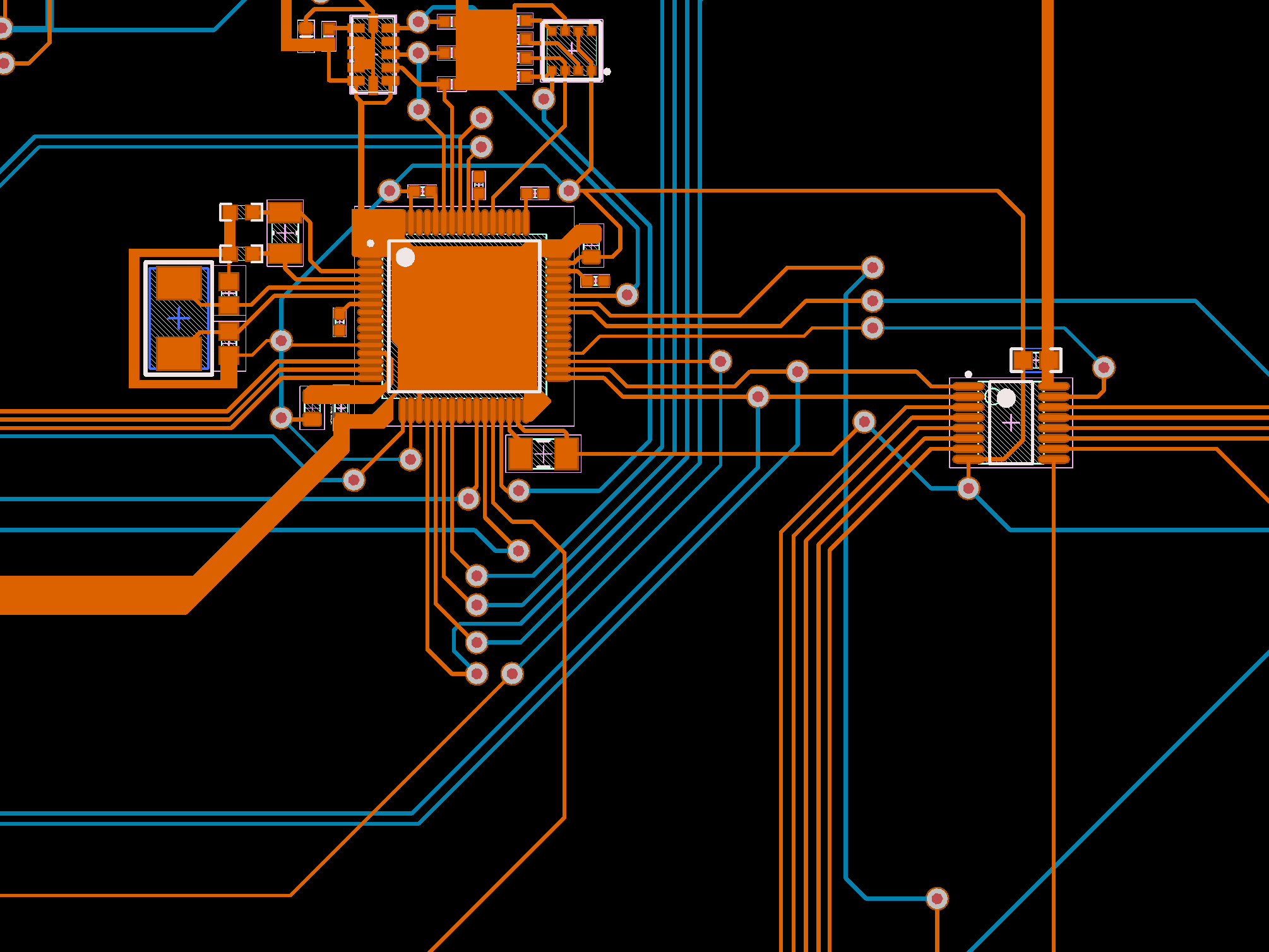
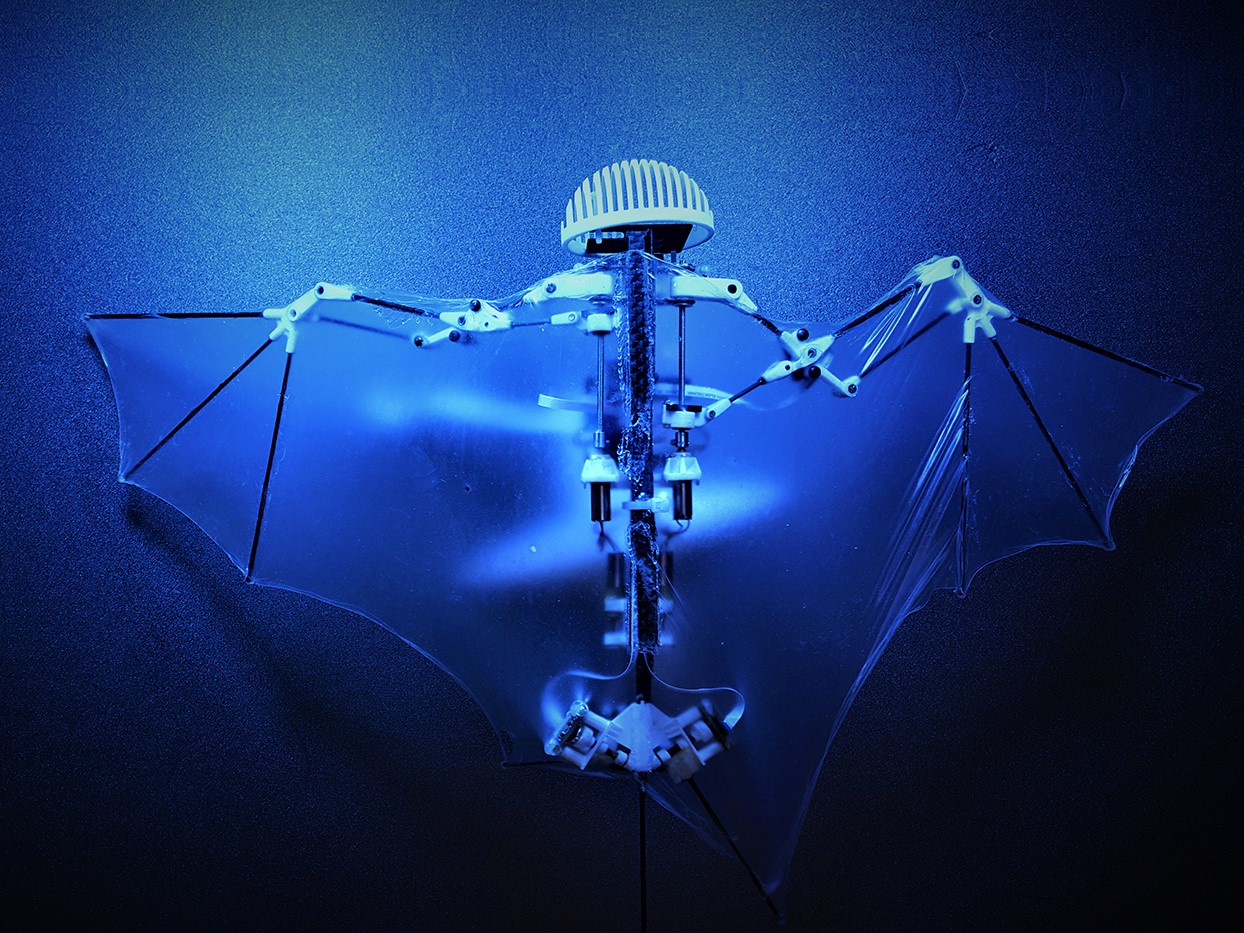
Bat Bot SiliconSynapse, Northeastern University The Bat Bot was designed and fabricated to test a hypothesis that a robot could fly by flapping its wings, and in doing so it could interact with people more safely than a propeller-driven arial robot. My contribution to this project was lasercutting PCB traces
onto the carbon fiber chassis to meet requirements concerning weight and drag, designing the layout of a flexible PCB that served a dual purpose as the bat's wing, soldering surface-mounted
components to the PCB under a microscope, and creating the skeleton program to access the actuators and sensors.
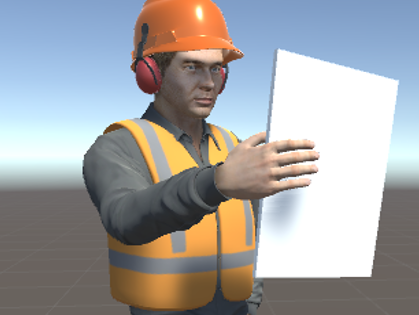
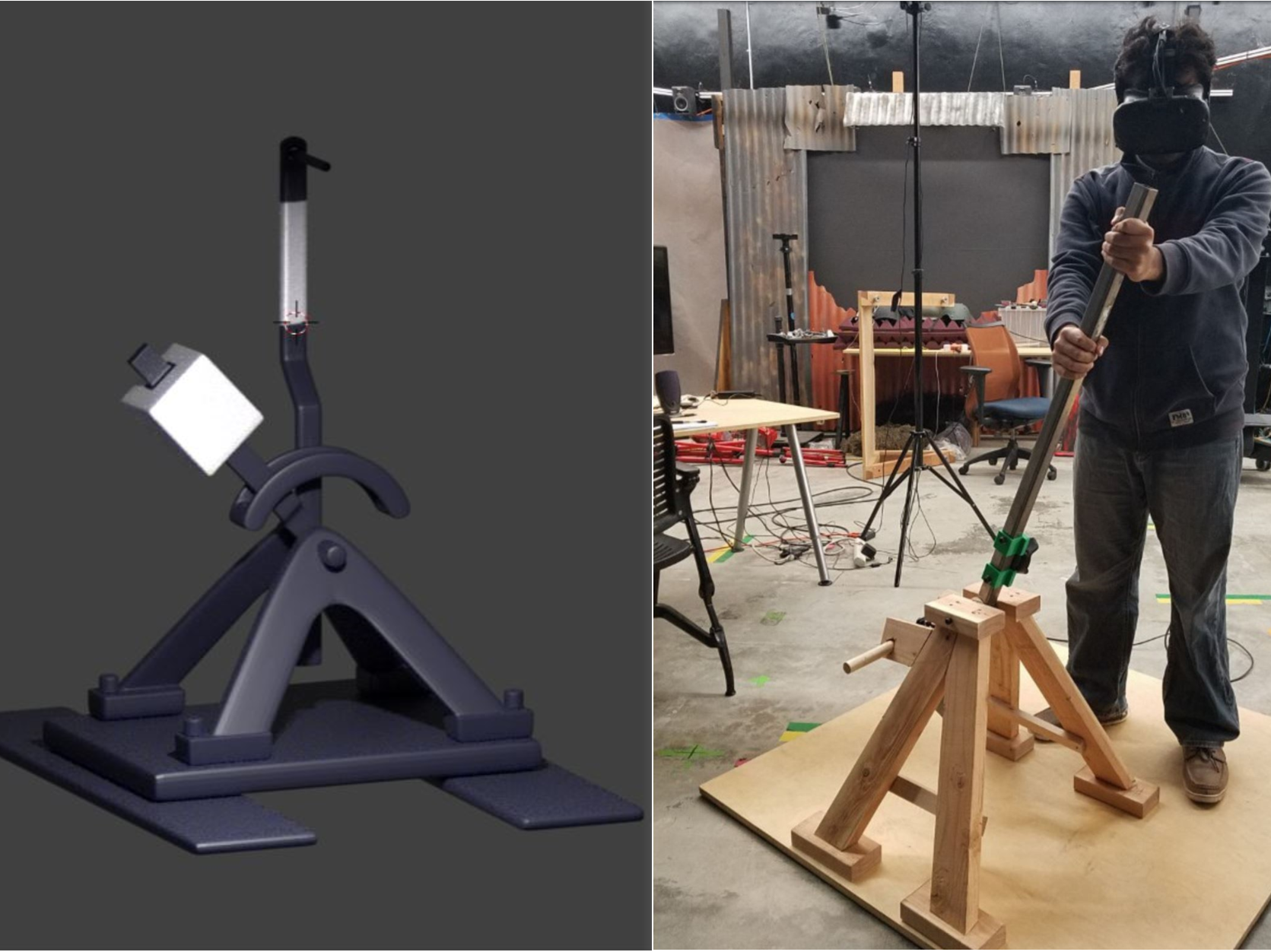
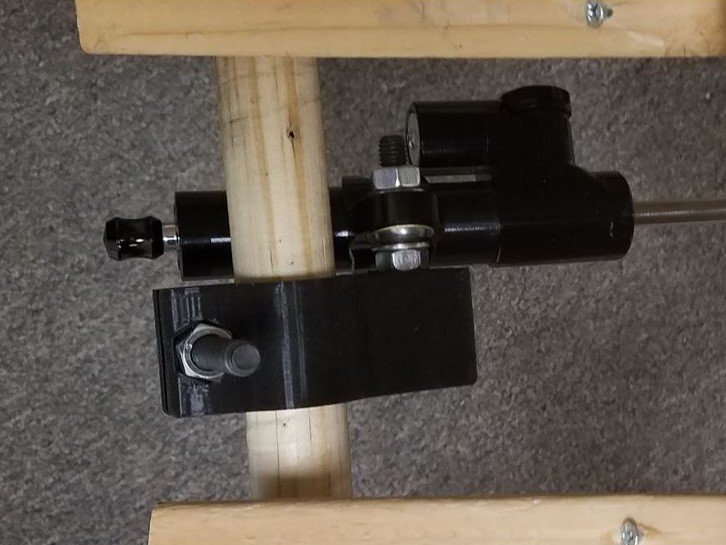
Augmented Reality Environment Mixed Reality Lab, University of Southern California To test the effect of fidelity and immersion of an augmented
reality environment on ethical decision-making, we created a virtual environment where the user would play a role in the trolley problem. My individual contribution was designing and fabricating
a physical lever using a motorcycle damper to enable the discrete control of the stiffness of the lever. The lever was outfitted with motion trackers to enable the realistic motion of
a corresponding virtual lever. I also 3D modeled several scene components like hard hats and vests in Blender.
Horseshoe Crab Robot Fab Lab, Dassault Systemes This was a project I worked on independently
while I was an intern at the Dassault Systemes FabLab. I was initially inspired to design this horseshoe crab robot after having attended
a BattleBots-like event thrown by a robot fighting league called Mass Destruction that was held in a makerspace called the Artisan's Asylum
where I used to volunteer. I noticed that the simple wedge shaped robots were the most effective despite many not even having a weapon,
because they were able to push the opposing robot against a wall in which position its own weapon would destroy itself. This horseshoe crab
robot could turn itself right side up like horseshoe crabs use their tails in the wild to avoid similar self-destruction.
PERSONAL PROJECTS
1985 Honda Aero 80 Restoration Pittsburgh, PA I purchased this scooter on Craigslist
from the neighbor of an elderly woman who used the scooter to get back and forth to her mailbox before she passed away. I
intentionally chose a scooter that was in really rough shape to teach myself to repair, as I could not possibly make this scooter
worse and I could learn to repair basically everything. Repairs performed included de-rusting and lining fuel tank, replacing the
bystarter/choke, replacing ignition coil, replacing front and rear brakes, cleaning the carburetor,
replacing piston rings and cylinder gaskets, replacing cracked fuel and air hoses, as well as repairing cracked fairings and painting.
Despite all this work, it has only ever run for days at a time. The repairs are still in progress as I wait for it to return from a
machine shop after the cylinder is bored. I believe the ghost of its previous owner still haunts it.
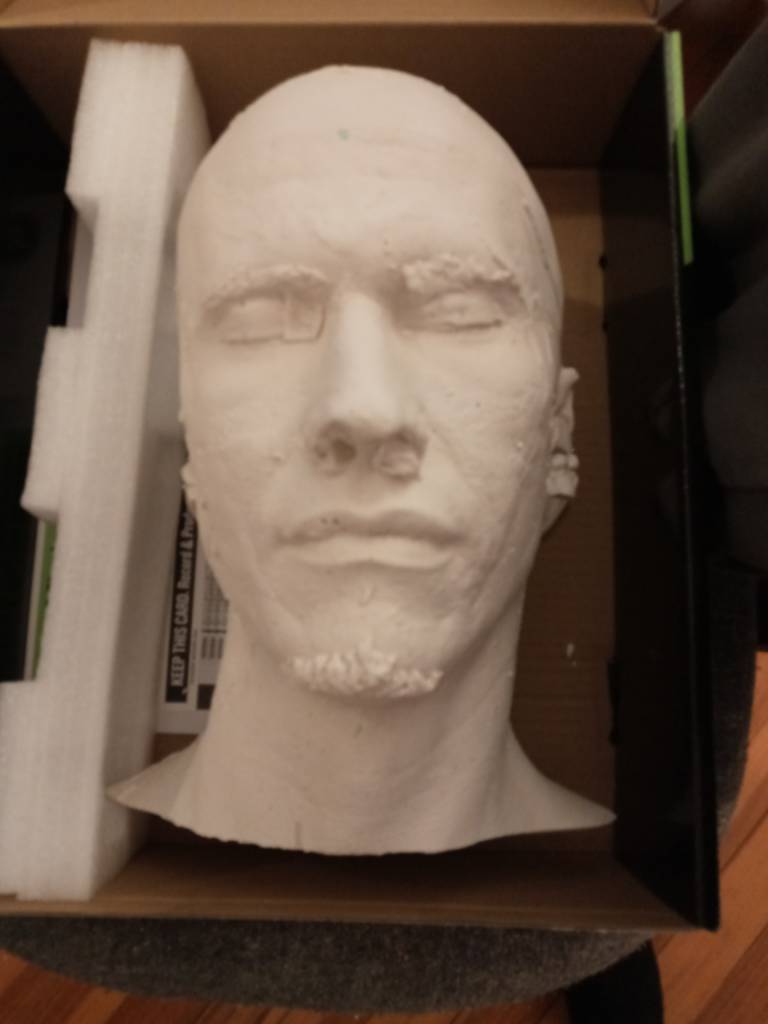
Collin's Head Providence, RI I used body-safe silicone to make a mold of a friend's head so I could
make a plaster cast, make a fiberglass mold of the cast and re-cast his head in silicone for robotic applications.
Miscellaneous Providence, RI I improvised a screenprinting setup using an overhead lamp
from home depot and panes of plexiglass and glass taken from picture frames. I also welded a part-lamp-part-planter at The Steel Yard
in Providence, RI.
CONFERENCES
Tesla AI Day Palo Alto, CA "Have you considered the utility of the human spirit?"
RESUME
RESUME
CONTACT
MADELEINE WEAVER
Pittsburgh, PA
Phone: (781) 591-1292
Email: maddygweaver@gmail.com
LinkedIn: linkedin.com/in/madeleine-weaver