GHOST Jelly
A Novel Actuation Approach to Limit Marine Life Disturbance
Project Overview
Owee Angare, Connor Geshan, TJ Thomas, Eion Tyacke, Madeleine Weaver
Bio-Inspired Robot Design and Experimentation, Carnegie Mellon University
As the effects of climate change begin to affect ecosystems in ways that aren’t immediately apparent, it’s important to observe environments at risk. Typically researchers use robotic underwater vehicles to track and study aquatic life. These robots are robust to incident currents underwater, but the wake from their propellers may disrupt the ecosystem the robot intends to study. To make aquatic environmental monitoring systems less obtrusive, we propose using a jellyfish-inspired robot to study marine life. We hypothesize that the wake from jellyfish-inspired robots will be less turbulent and therefore reduce the disturbance to the ecosystem. We show that an electromagnet-driven propulsion system will produce less turbulent wake than propeller-based systems.
Individual Contributions: Design of the electromagnetic actuation system and entire small scale prototype, design and manual fabrication of the full-sized jellyfish bell, electrical design for the electromechanical actuation system, design and execution of evaluation experiments of some subcomponents.
Awarded 'Best Overall Project' at Design Expo
A jellyfish-inspired robot, compared to current robots, will enable less obtrusive ocean observation
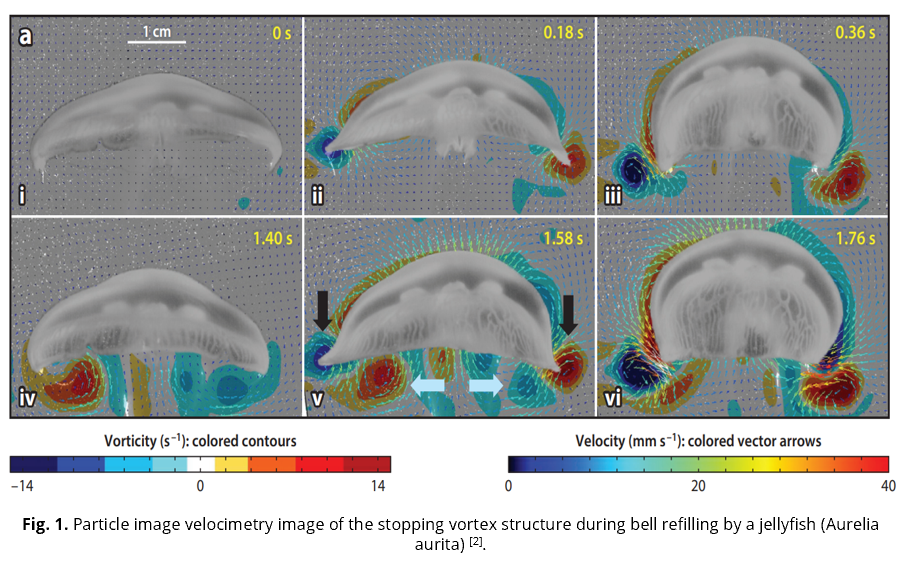
Current ocean exploration technologies disrupt marine life's behavior, physiology, reproduction, and even survival as a result of the wake from their propellers. We hypothesize that a jellyfish’s swimming dynamics will be less turbulent than conventional propellers.
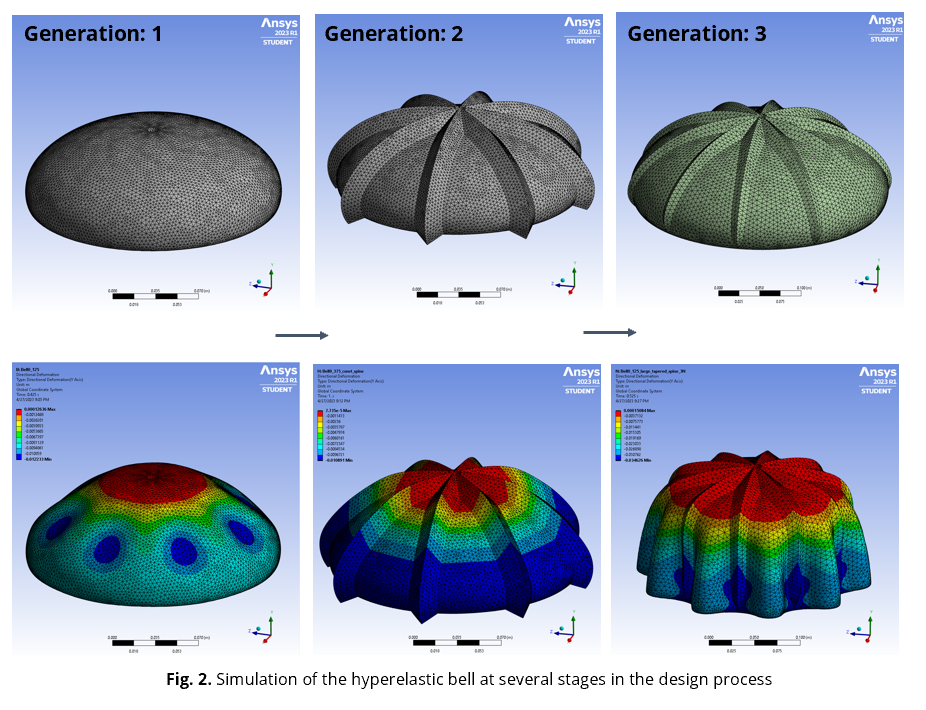
Adding splines to the bell’s design, increases rigidity and allows for consistent deformation
After inputting the propulsion force generated by the electromagnets, evaluation of the simulation at each iteration informed the design of the bell’s shape and thickness.
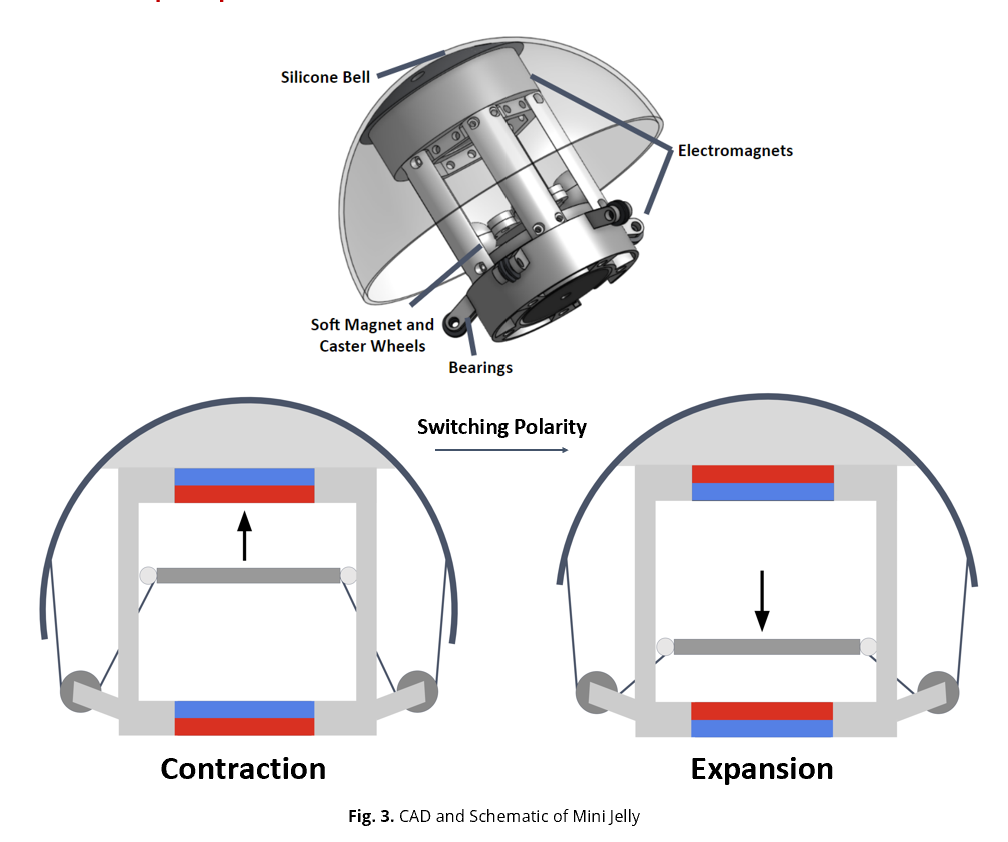
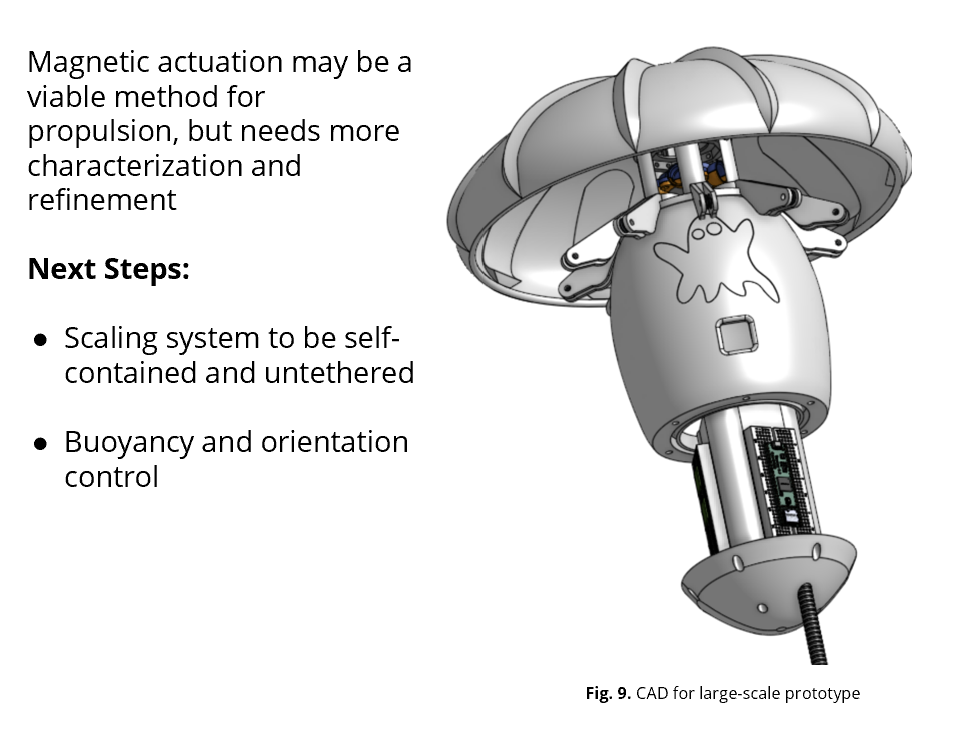
Two electromagnets alternately repel and attract the “soft magnet” which actuates the bell and increases the force of propulsion
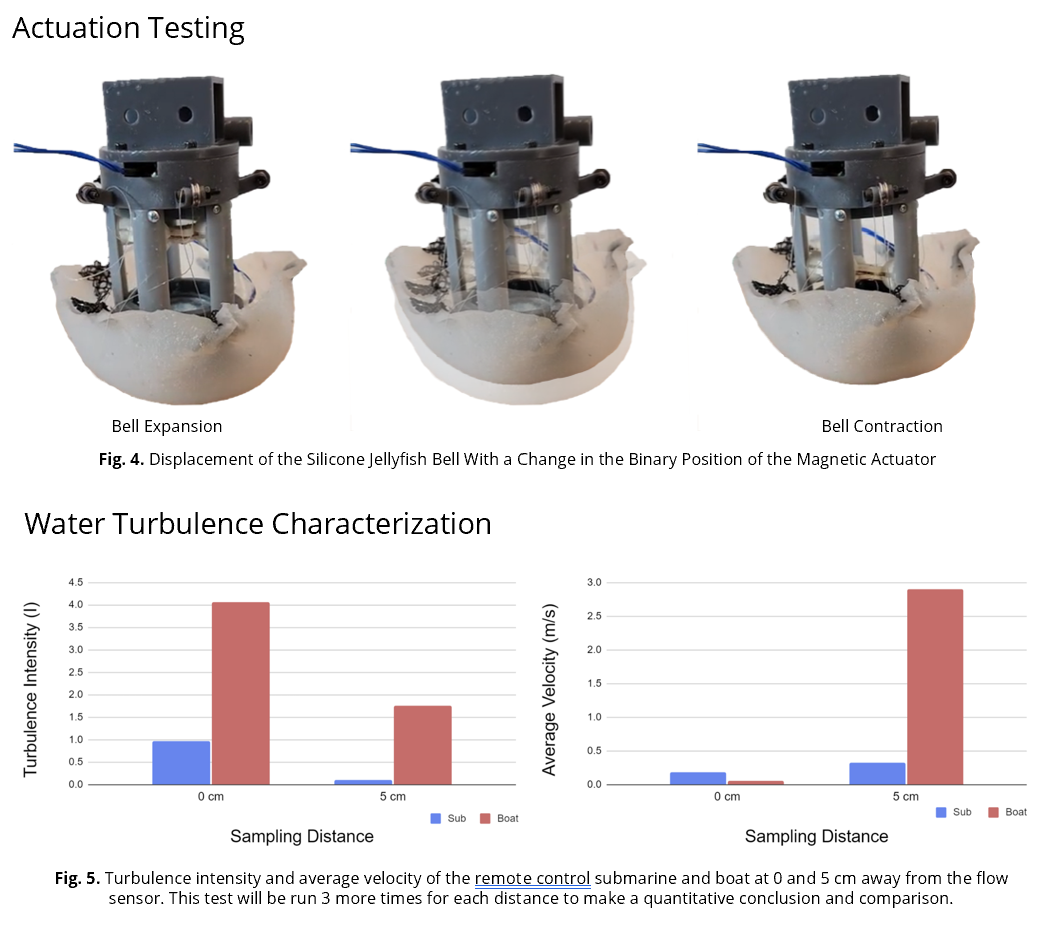
The proposed electromagnetic propulsion system actuated and contracted the bell by a radial 2.75 cm
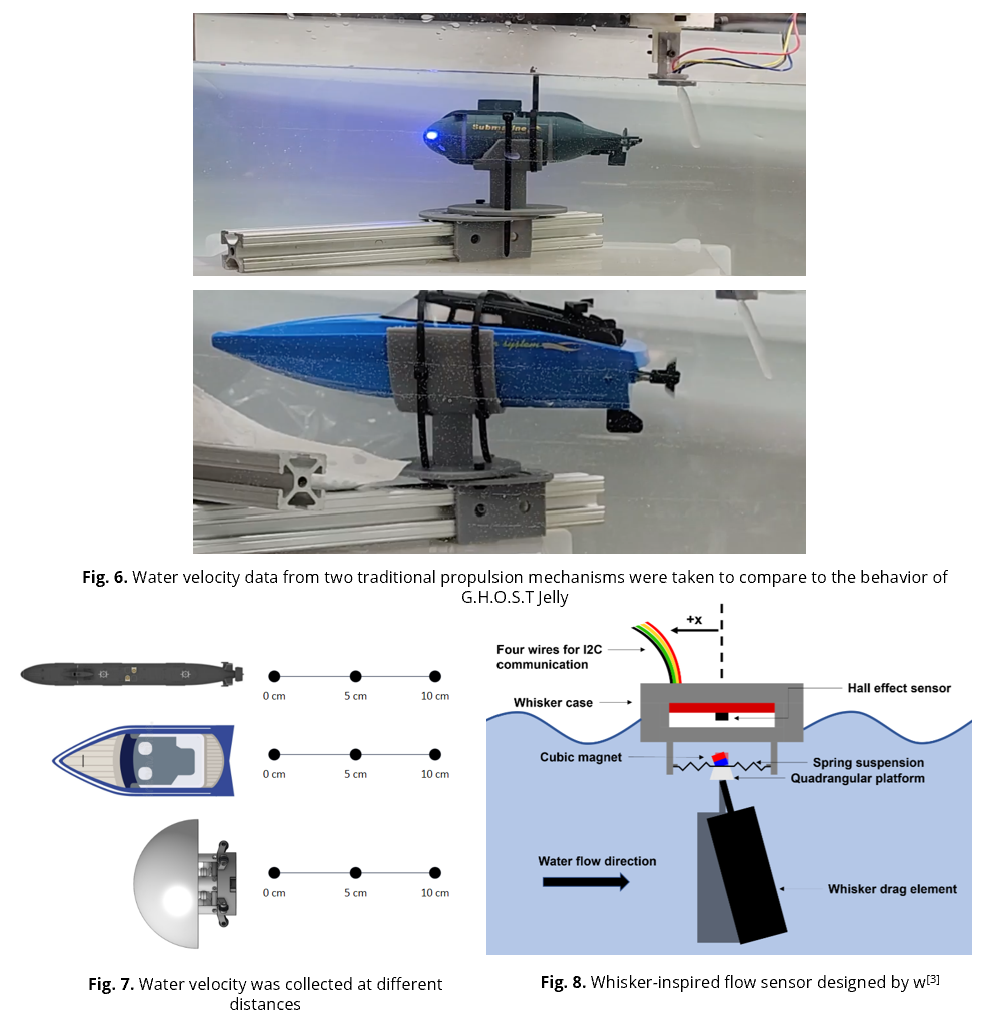
Our actuation, compared to a submarine and boat of comparable size, must produce less turbulence